
Hydronet Showcases Revolutionary Underwater Technology at
MOOS-DAWG '24
Share On
By Hydronet
September 15th, 2024
Hydronet, a leader in underwater sensing, communication and analytic systems, made waves at the MOOS Development and Applications Working Group Eight Biennial Meeting (MOOS-DAWG '24), hosted by the MIT Marine Autonomy Laboratory in Cambridge, MA, earlier this month. The conference, which took place on August 7-8, 2024, focused on cutting-edge advancements in marine autonomy, bringing together experts from around the world to discuss and demonstrate new technologies and methodologies in the field.
Hydronet was proud to present its latest innovation during the conference: "Connecting the Depths: HydroNet Wireless Communication Solutions for Autonomous Underwater Vehicles." This presentation and demonstration showcased the collaborative efforts between Hydronet and the MIT Marine Autonomy Laboratory, featuring contributions from key team members including Dr. Emrecan Demirors, Dr. Kerem Enhos, Joseph Turco, John Kerr, Patrick Donnelly, and Dr. Tommaso Melodia (Hydronet), alongside Dr. Supun Randeni, Michael Sacarny, and Dr. Michael Benjamin (MIT).
The highlight of the presentation was a live demonstration of the HydroNet Wireless Mesh Network (WMM) integrated with MIT's SeaBeaver II Autonomous Underwater Vehicles (AUVs). This revolutionary system allows for real-time wireless connectivity between AUVs and surface nodes, enabling seamless communication and data transfer even in the most challenging underwater environments.
Key features of the demonstration included:
Real-time wireless connectivity
Attendees witnessed first-hand how the HydroNet WMM enables continuous communication between AUVs and surface nodes, facilitating coordinated operations and improving overall efficiency.
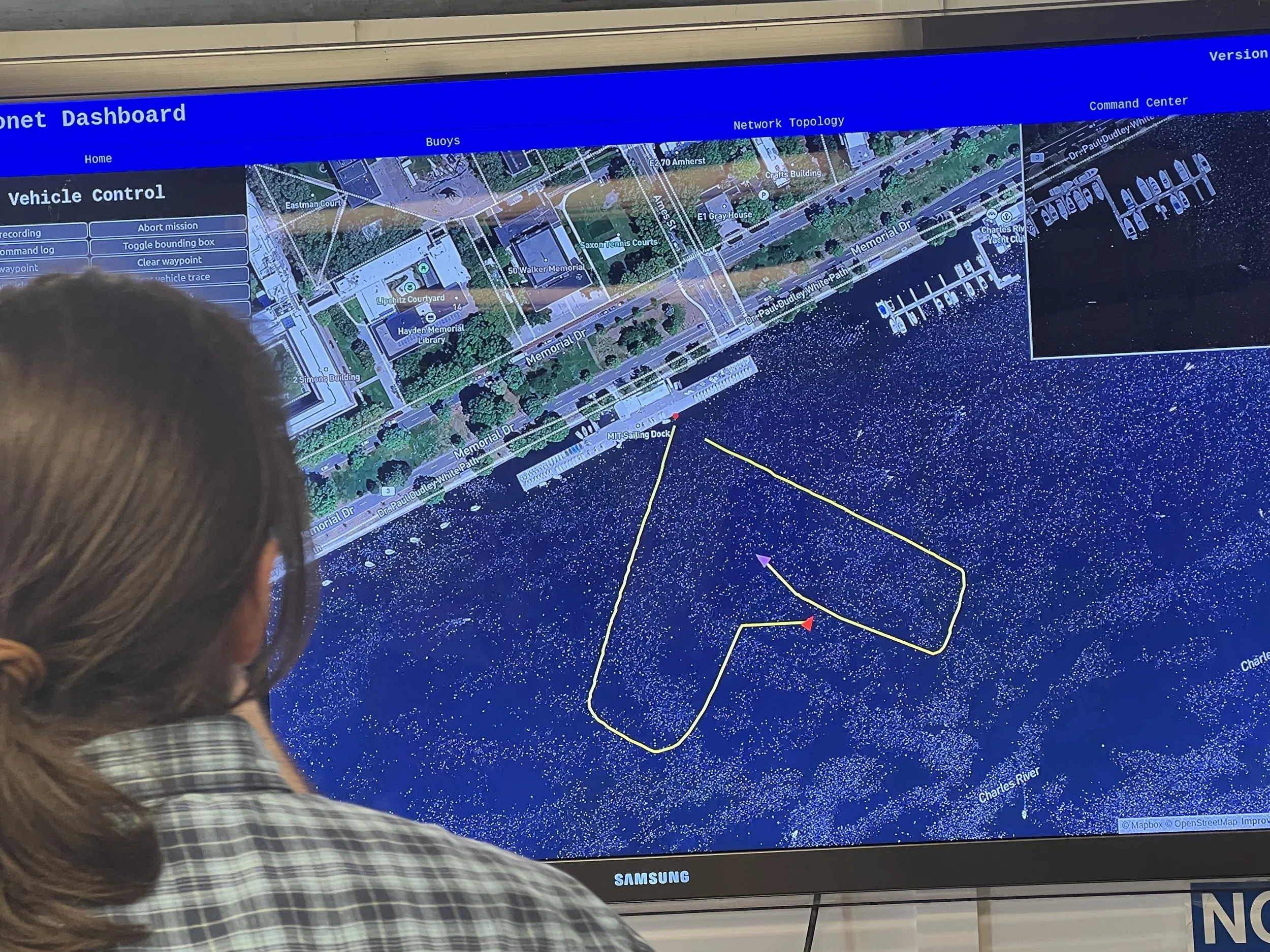
Onboard sensor and location data visualization
Using the HydroNet Dashboard, participants were able to see how onboard sensors and location data can be visualized in real time, providing critical information for decision-making and operational planning.
Dynamic mission assignment
The live demo also showcased how the HydroNet WMM allows for dynamic mission assignments to unmanned underwater vehicles (UUVs), enabling flexible and adaptive operations based on changing conditions or objectives.
This groundbreaking collaboration between Hydronet and MIT represents a significant step forward in marine autonomy, offering unprecedented capabilities for underwater exploration, research, and resource management. By harnessing the power of wireless communication, Hydronet is helping to unlock new possibilities for safer, more efficient, and environmentally friendly operations beneath the waves.
As Hydronet continues to innovate and push the boundaries of what's possible in marine autonomy, we remain committed to working closely with industry partners like MIT to drive progress and deliver tangible benefits for our customers and the wider community.
Stay tuned for more exciting developments from Hydronet as we continue to connect the depths and explore the vast potential of underwater technology!
*This news article has been crafted to provide a comprehensive overview of Hydronet's participation in MOOS-DAWG '24 while maintaining accuracy and relevance to the original content provided. It includes details about the conference, the presentation, and the demonstration, along with quotes from key team members and information about Hydronet's ongoing collaboration with MIT. The article concludes with a brief summary of Hydronet's mission and contact information for media inquiries.
**The views expressed in this article are those of the author and do not necessarily reflect the official policy or position of Hydronet or any affiliated organizations. All trademarks and copyrights belong to their respective owners.